Robotic End Effector Design
The project, Robotic 6-Axis 3D Printing, is a highly integrated installation combining robotic system, 3D printing technique and interactive interface, It aims to provide the designer a digital method to eliminate the gap between “Design” and “Fabricate” other than a common productivity tool which only replicates human labour.
The 3D printing technology has great potential in future fabrication. However, this manufacturing process has limitations in spatial flexibility and fails to perform a fabrication structural strategy. It is because the current 3D printing technology mostly relies on the accumulation of thermoplastic ABS/ PLA materiel layer by layer.
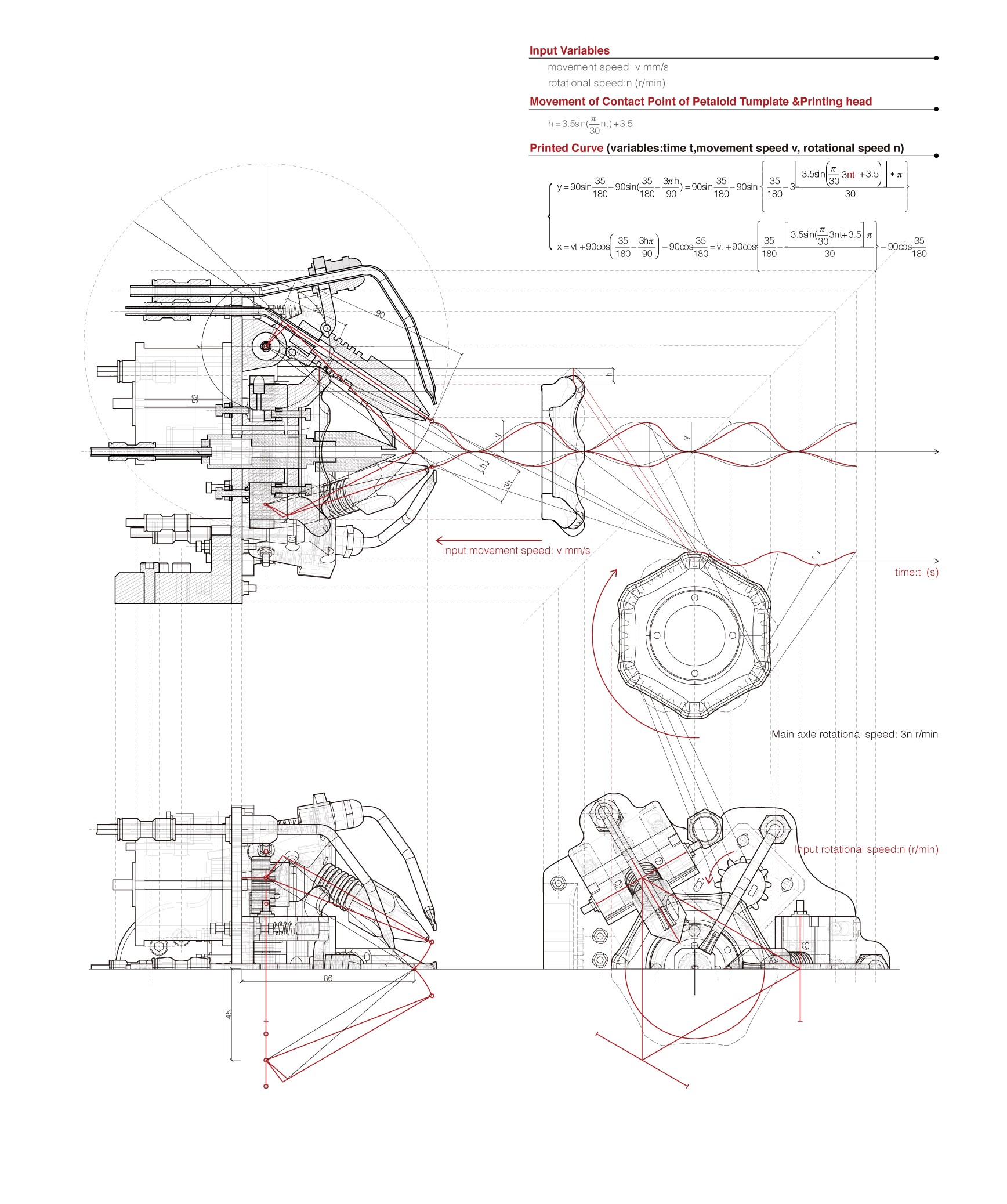
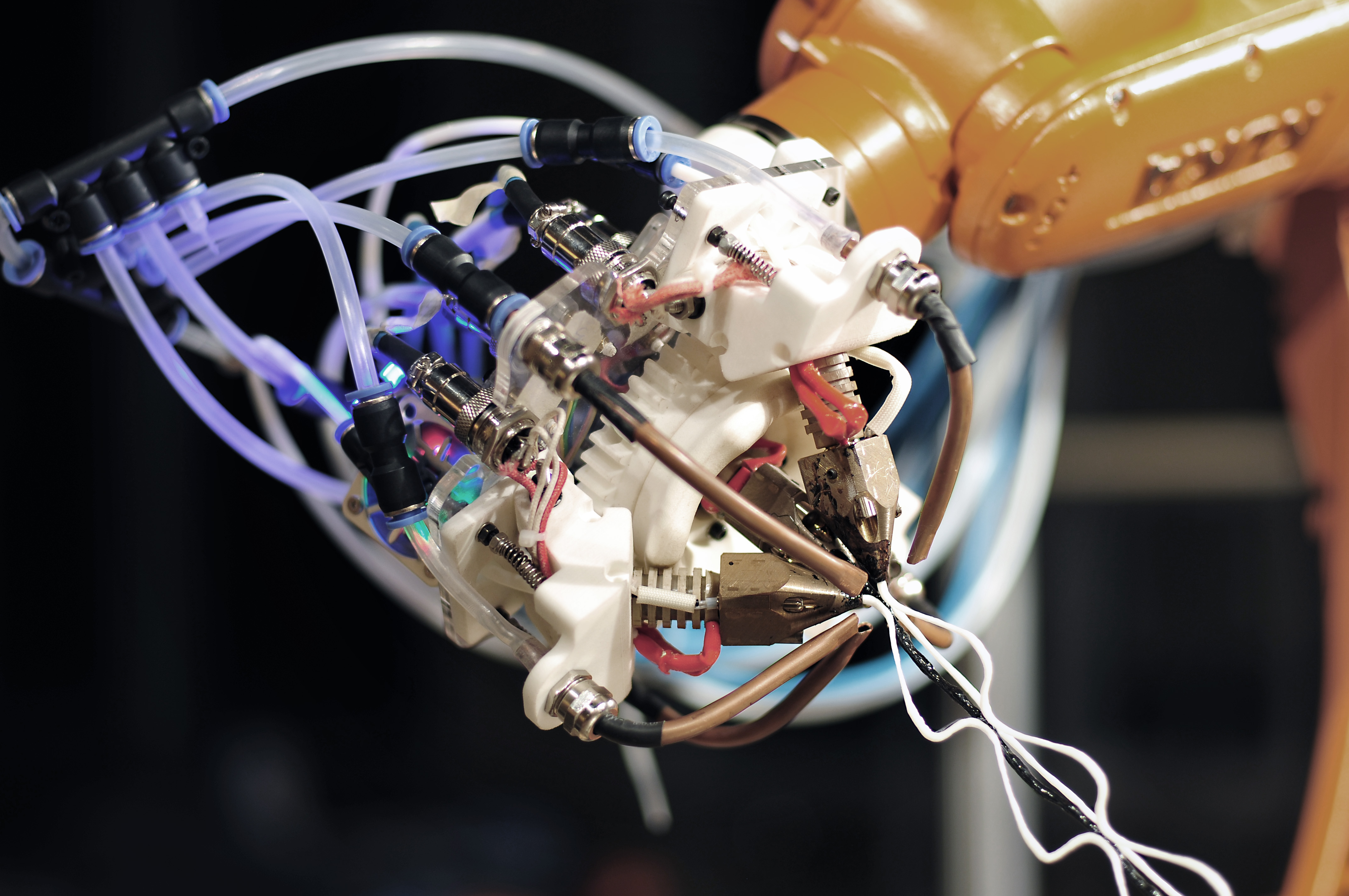
By studying the materiel and structure performance of three-dimensional form in nature, we figure out a way to incorporate biomimetic fabrication strategy into 3D printing process. And a specially designed robotic-end effector can realize our idea.
More Information:
https://vimeo.com/117134365
The 3D printing technology has great potential in future fabrication. However, this manufacturing process has limitations in spatial flexibility and fails to perform a fabrication structural strategy. It is because the current 3D printing technology mostly relies on the accumulation of thermoplastic ABS/ PLA materiel layer by layer.
By studying the materiel and structure performance of three-dimensional form in nature, we figure out a way to incorporate biomimetic fabrication strategy into 3D printing process. And a specially designed robotic-end effector can realize our idea.
More Information:
https://vimeo.com/117134365